Maison
>
Des produits > Gyroscope à fibre optique > Gyroscope à fibre optique > Unité de mesure inertielle Mems de brouillard de gyroscope à fibre optique
Des produits
Nouveaux produits





Unité de mesure inertielle Mems de brouillard de gyroscope à fibre optique
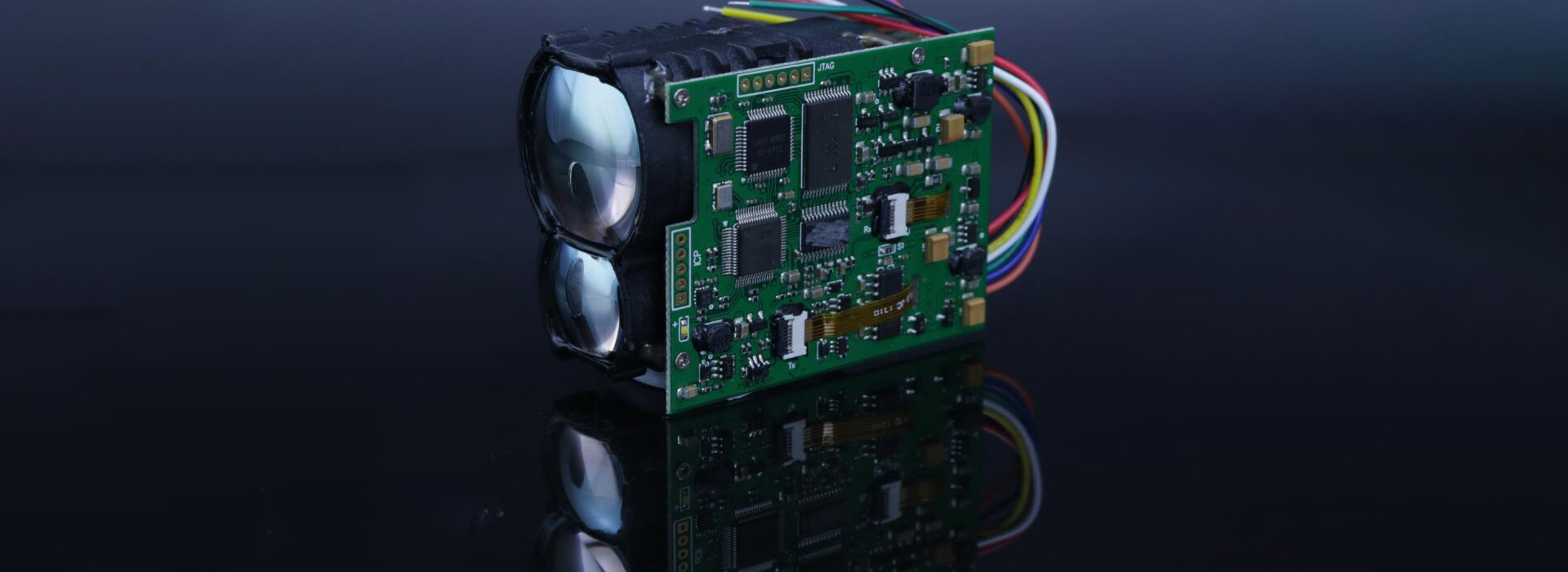
JIO-MC200-IMU est une unité de mesure inertielle (IMU) basée sur la technologie micromécanique (MEMS) avec un gyroscope MEMS haute performance intégré et un accéléromètre MEMS qui produit une vitesse angulaire sur 3 axes et une accélération sur 3 axes. Bienvenue pour acheter une unité de mesure inertielle Mems de brouillard de gyroscope à fibre optique chez nous.
Modèle:JIO-MC200-IMU
envoyer une demande
Description du produit
Vue d'ensemble de l'unité de mesure inertielle Mems de brouillard de gyroscope à fibre optique
JIO-MC200-IMU est une unité de mesure inertielle (IMU) basée sur la technologie micromécanique (MEMS) avec un gyroscope MEMS haute performance intégré et un accéléromètre MEMS qui produit une vitesse angulaire sur 3 axes et une accélération sur 3 axes.
JIO-MC200-IMU a une excellente adaptabilité sexuelle et environnementale. Grâce à l'association de différents logiciels, les produits peuvent être largement utilisés dans les munitions guidées, les drones tactiques et industriels, les véhicules aériens sans pilote, le chercheur, la conduite autonome de voiture.
L'installation JIOPTICS du gyroscope à fibre optique pour faciliter la flexibilité d'intégration, et notre boîte à outils de développement pour le prototypage rapide, répondent non seulement aux exigences des spécifications, mais fournissent également des performances de haute qualité répondant à la demande des utilisateurs finaux.
JIO-MC200-IMU a une excellente adaptabilité sexuelle et environnementale. Grâce à l'association de différents logiciels, les produits peuvent être largement utilisés dans les munitions guidées, les drones tactiques et industriels, les véhicules aériens sans pilote, le chercheur, la conduite autonome de voiture.
L'installation JIOPTICS du gyroscope à fibre optique pour faciliter la flexibilité d'intégration, et notre boîte à outils de développement pour le prototypage rapide, répondent non seulement aux exigences des spécifications, mais fournissent également des performances de haute qualité répondant à la demande des utilisateurs finaux.
Nos services
JIOPTICS est une équipe professionnelle et efficace. Fournissez des services OEM/ODM pour vous, contactez-nous pour personnaliser votre gyroscope à fibre optique exclusif
caractéristiques du produit
1)gyroscope numérique à trois axes :
a) Plage de mesure dynamique ±450º/s ;
b) Stabilité de polarisation nulle : 20 °/h (GJB, 10 S) ;
2)Accéléromètre numérique à trois axes :
a) Plage de mesure dynamique ±16g ;
b) Stabilité du biais zéro : 0,5 mg (GJB, 10 S) ;
3)Haute fiabilité : MTBF
4)Plage de température complète (-40â~70â) pour garantir la précision : algorithme intégré d'étalonnage et de compensation de température haute performance ;
5)Convient au travail dans des conditions de fortes vibrations ;
6)Interface 1 voie UART
a) Plage de mesure dynamique ±450º/s ;
b) Stabilité de polarisation nulle : 20 °/h (GJB, 10 S) ;
2)Accéléromètre numérique à trois axes :
a) Plage de mesure dynamique ±16g ;
b) Stabilité du biais zéro : 0,5 mg (GJB, 10 S) ;
3)Haute fiabilité : MTBF
4)Plage de température complète (-40â~70â) pour garantir la précision : algorithme intégré d'étalonnage et de compensation de température haute performance ;
5)Convient au travail dans des conditions de fortes vibrations ;
6)Interface 1 voie UART
Champ d'application
1) Munitions guidées
2)Chercheur
3) Drones tactiques et industriels
4) Pilote automatique
2)Chercheur
3) Drones tactiques et industriels
4) Pilote automatique
Caractéristiques électriques
-Alimentation: entrée de tension large 12 ~ 36V
- Puissance nominale : 24W (max)
- Puissance nominale : 24W (max)
Métriques du produit
| Paramètres |
Conditions d'essai |
Le minimum |
Valeur typique |
Valeur maximum |
Unités |
|
| Gyro |
Plage de mesure dynamique |
|
|
450 |
|
°/s |
| Stabilité zéro biais |
10s moyenne (-40â~ 70â, température constante) |
|
20 |
|
°/h. |
|
| Zéro biais |
Plage de biais zéro |
|
/ - 0,2 |
|
°/s |
|
| Zéro déviation â sur toute la plage de température |
|
/ - 0,1 |
|
°/s |
||
| Répétabilité pour les démarrages successifs, axe Z |
|
30 |
|
°/h. |
||
| Effet de l'accélération linéaire sur le biais zéro |
|
10 |
|
°/h/g |
||
| Vibration â¡ sur l'effet de polarisation zéro, avant et après le changement de vibration |
|
10 |
|
°/h/g |
||
| Vibration â¡ à effet de biais nul, vibration après changement de vibration |
|
10 |
|
°/h/g |
||
| Facteur d'échelle |
Le facteur d'échelle n'est pas linéaire |
|
500 |
|
ppm |
|
| Précision du facteur d'échelle |
|
2000 |
|
ppm |
||
| Densité de bruit |
|
|
0.003 |
|
°/Hz/s) |
|
| Résolution |
|
|
3.052 x 10â7 |
|
°/s/LSB |
|
| Accéléromètre |
Plage de mesure dynamique |
|
|
16 |
|
g |
| Stabilité zéro biais |
10s moyenne (-40â~ 70â, température constante) |
|
0.5 |
|
mg |
|
| Zéro biais |
Plage de biais zéro |
|
5 |
|
mg |
|
| Zéro écart sur toute la plage de température |
|
5 |
|
mg |
||
| Répétabilité des démarrages successifs |
|
0.5 |
|
mg |
||
| Facteur d'échelle |
Le facteur d'échelle n'est pas linéaire |
|
500 |
|
ppm |
|
| Précision du facteur d'échelle |
|
2000 |
|
ppm |
||
| Densité de bruit |
|
|
0.05 |
|
Hz/mg) |
|
| Résolution |
|
|
1.221 x 10â8 |
|
g/LSB |
|
| Autre |
Temps de démarrage |
|
|
2 |
|
s |
| Paramètres |
Conditions d'essai |
Le minimum |
typique |
valeur |
valeur maximum |
unités |
| propriétés |
Bande passante |
|
|
200 |
|
hertz |
| Retard |
|
|
10 |
|
SP |
|
| Interface de Communication |
UART 1 voie |
Débit en bauds |
|
460.8 |
|
Kbps |
| Fréquence d'échantillonnage |
UART |
|
500 |
|
hertz |
|
| Caractéristiques électriques |
Tension |
|
4.8 |
5 |
5.2 |
V |
| Consommation d'énergie |
|
|
1.5 |
|
W |
|
| Ondulation |
P-P |
|
100 |
|
mV |
|
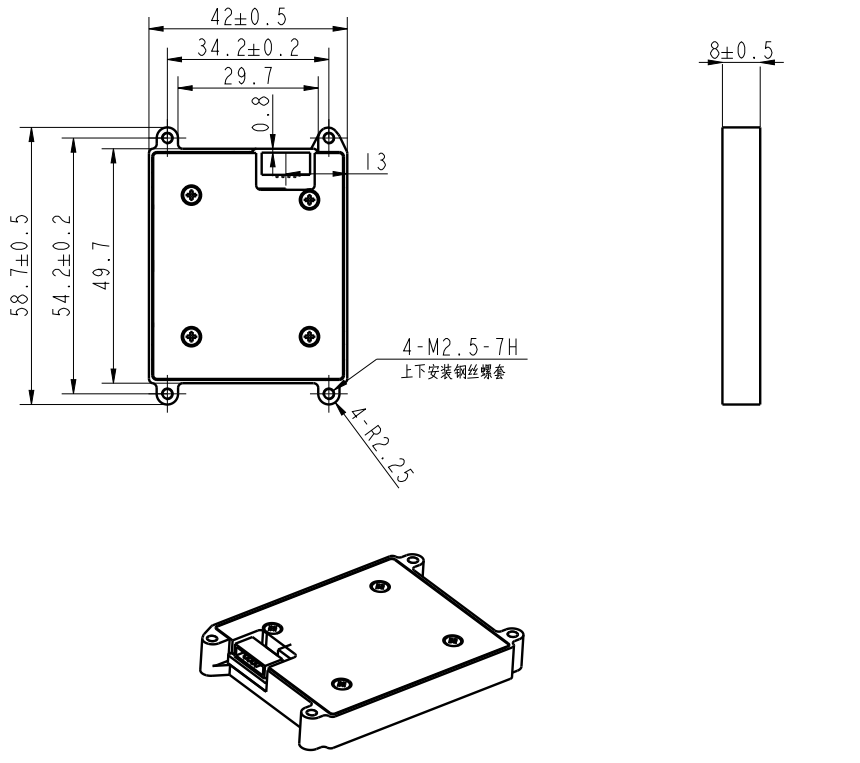
| Caractéristiques structurelles |
Taille |
|
|
58,7 x 42 x 8 |
|
millimètre |
| Lester |
|
|
35 |
|
g |
|
| Environnement d'utilisation |
Température de fonctionnement |
|
- 40 |
|
70 |
℃ |
| Température de stockage |
|
- 45 |
|
75 |
℃ |
|
| Vibration |
|
|
20 à 2000Hz, 6.06g |
|
|
|
| Impact |
|
|
500g |
|
|
|
| Environnement d'utilisation |
MTBF |
|
|
20000 |
|
h |
| Heures de travail continues |
|
|
120 |
|
h |
|
| â : Calculer l'écart zéro de l'ensemble du processus de variation de température, taux de variation de température â¤1â/min, plage de température -40â~ 70â ; â¡ : la condition de vibration est de 6,06 g, 20 Hz à 2 000 Hz |
||||||
Interface électrique
Type de connecteur : A1251WR-S-4P ;
Les points de connexion sont définis dans le tableau suivant :
Les points de connexion sont définis dans le tableau suivant :
| Épingles |
Définition |
Les fonctions |
Remarques |
|
1 |
5V |
Entrée d'alimentation CC |
|
|
2 |
Terre |
pour |
|
|
3 |
TX BT-TTL |
Envoi port série |
3,3 V |
|
4 |
RX LV-TTL |
Réception port série |
3,3 V |
Interface logicielle
Débit en bauds : 460 800 bps ;
Fréquence d'envoi : 500 Hz ;
Format de données : bit de données 8, bit d'arrêt 1, aucun bit de parité ;
Lorsque des données sont transmises, elles sont basses puis hautes.
Les protocoles de communication sont présentés dans le tableau suivant :
Fréquence d'envoi : 500 Hz ;
Format de données : bit de données 8, bit d'arrêt 1, aucun bit de parité ;
Lorsque des données sont transmises, elles sont basses puis hautes.
Les protocoles de communication sont présentés dans le tableau suivant :
| octet |
Données |
Former |
Résolution |
Remarques |
|
1 |
0x5A |
Uint8 |
|
|
|
2 |
0x5A |
Uint8 |
|
|
| 3-6 |
Taux angulaire X |
flotter |
|
|
| 7-10 |
Taux angulaire Y |
flotter |
|
|
| 11-14 |
Taux angulaire Z |
flotter |
|
|
| 15-18 |
Taux angulaire X |
flotter |
|
|
| 19-22 |
Taux angulaire Y |
flotter |
|
|
| 23-26 |
Taux angulaire Z |
flotter |
|
|
| 27-30 |
Réservé |
Uint8 |
|
|
|
31 |
Température |
int8 |
1 â |
Plage : -128 à 127 |
|
32 |
Et vérifie |
Uint8 |
|
1-31 octets s'additionnent et prennent 8 bits en dessous |
Interface structurelle
Balises actives: Unité de mesure inertielle Mems de brouillard de gyroscope à fibre optique, fabricants, fournisseurs, usine, Chine, fabriqué en Chine, personnalisé, haute qualité
Catégorie associée
envoyer une demande
N'hésitez pas à faire votre demande dans le formulaire ci-dessous. Nous vous répondrons dans les 24 heures.
Produits connexes