Maison
>
Des produits > Module télémètre laser > Module télémètre laser 1535nm > Module télémètre laser (LRF) sans danger pour les yeux, 5 km
Des produits
Nouveaux produits




 sans danger pour les yeux, 5 km")




Module télémètre laser (LRF) sans danger pour les yeux, 5 km
STA-B50MX est un module de mesure de distance laser sans danger pour les yeux, qui peut détecter la distance cible et transmettre la distance mesurée à l'ordinateur supérieur via une communication série. Visibilité ≥ 12 km, réflectivité de la cible ≥ 0,3, humidité ≤ 80 %, distance de portée du véhicule (cible OTAN de 2,3 m × 2,3 m) ≥ 5 km.
envoyer une demande
Description du produit
Fonctions principales
(1) à portée unique et à portée continue ;
(2) Répondre aux commandes de télémétrie laser et peut arrêter la télémétrie à tout moment selon la commande d'arrêt ;
(3) Sortie des données de distance et des informations d'état une fois par impulsion pendant la mesure de distance ;
(4) Il peut signaler le nombre cumulé d'impulsions laser transmises (aucune perte de puissance) ;
(5) Sélection de distance, indication de cible avant et arrière ;
(6) Fonction d'auto-test.
(2) Répondre aux commandes de télémétrie laser et peut arrêter la télémétrie à tout moment selon la commande d'arrêt ;
(3) Sortie des données de distance et des informations d'état une fois par impulsion pendant la mesure de distance ;
(4) Il peut signaler le nombre cumulé d'impulsions laser transmises (aucune perte de puissance) ;
(5) Sélection de distance, indication de cible avant et arrière ;
(6) Fonction d'auto-test.
Indice de performance du produit
| Article | Paramètre technique | Instruction |
| Modèle | STA-B50MX | |
| Longueur d'onde de travail | 1535 ± 5 nm | |
| Sécurité oculaire | Classe 1 (CEI 60825-1) | |
| Ouverture de réception | Φ25mm | |
| Ouverture d'émission | Φ10mm | |
| Capacité de télémétrie | 30-8000m | |
| Plage de portée | ≥10000m | Portée MAX, réflectivité : 0,9, visibilité de l'observateur 25 km |
| ≥7000m | Cibles de grands bâtiments, réflectivité : 0,6, visibilité de l'observateur 20 km | |
| ≥5000m | Cible de l'OTAN | |
| ≥3000m | Cible humaine | |
| ≥1500m | Cible du drone | |
| Mini-gamme | 30m |
|
| Détection multi-cibles | Jusqu'à 3 cibles |
|
| Résolution de plage | 30m |
|
| Précision de la portée | ±1m |
|
| Fréquence de télémétrie | 1 ~ 10 Hz réglable |
|
| Taux de précision | ≥98 % |
|
| Taux de fausses alarmes | 1% |
|
| Angle de divergence | ≤0,5mrad |
|
| Interface de communication | RS422 | L'interface TTL/RS232 peut être personnalisée |
| Tension | DC9 ~ 32 V |
|
| Consommation d'énergie | ≤1,2W (@1hz) | Puissance de travail |
| ≤5W@12V | Puissance de pointe | |
| 0,1W | Alimentation de veille (Connectez POWER-ON) | |
| Stabilité de l'axe optique du laser | ≤0,05mrad |
|
| Erreur parallèle | ≤0,3mrad | Erreur de parallélisme de l'axe optique par rapport à la référence de montage |
| Choc mécanique | 75g, 1ms |
|
| Température de travail | -40 ℃ ~ + 70 ℃ |
|
| Température de stockage | -55 ℃ ~ + 75 ℃ |
|
| Fiabilité | MTBF ≥ 1500h |
|
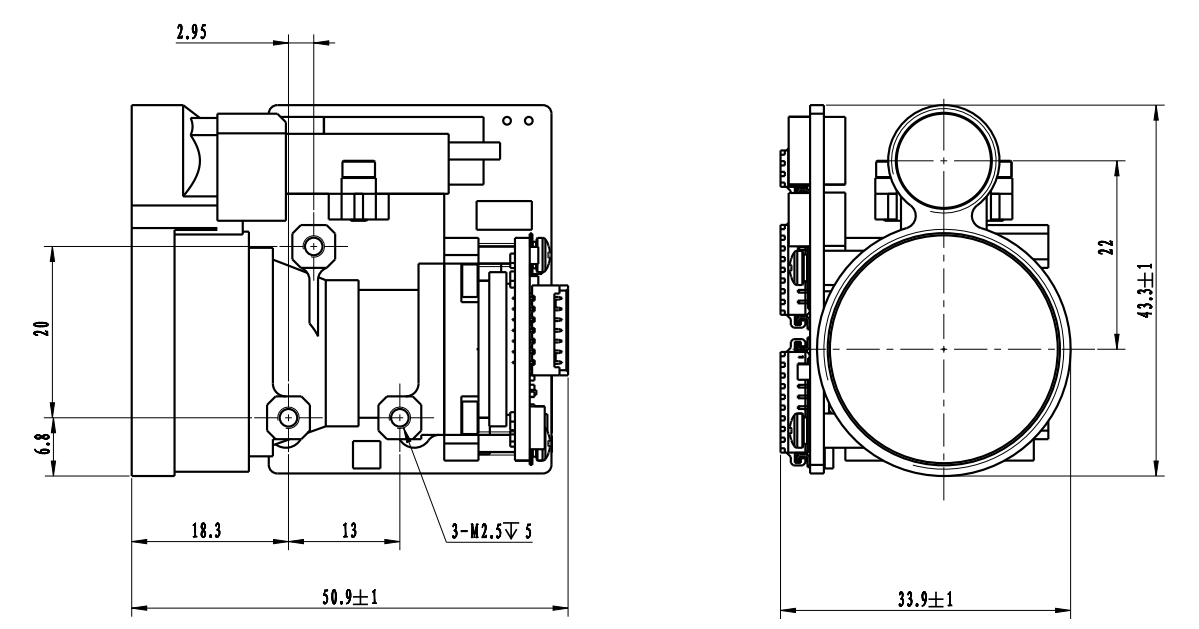
| Taille | ≤50x32x43,5 mm |
|
| Poids | ≤75g |
|
| Fonction principale | Télémétrie de la première et de la dernière cible, Télémétrie multi-cibles, Sélectivité de distance | |
Remarques :
1) Taille de la cible OTAN 2,3 m × 2,3 m ; Taille de la cible humaine 0,5 m × 1,7 m ; Taille de la cible du drone 0,2 m × 0,3 m ; Réflectivité 30 %, humidité≤80 %, visibilité de l'observateur≥ 12 km
Interface d'installation des structures
Interface externe
| Épingle | Définition | Fonction | Remarques |
| 1 | RX+ | Récepteur RS422 + | Bleu |
| 2 | RX- | Récepteur RS422 - | Vert |
| 3 | TX- | Transmission RS422 - | Violet |
| 4 | Émission+ | Transmission RS422 + | Jaune |
| 5 | GND | Fil de terre de communication | Blanc |
| 6 | VEE | Alimentation + | Rouge |
| 7 | GND | Alimentation - | Noir |
| 8 | PWR FR | / | Cendre |
Interface externe
Modules de gamme OEM/ODM et solutions personnalisées
Le B50MX est conçu pour les intégrateurs de systèmes à la recherche d'une solution de télémétrie laser pratique, puissante et compacte. Il offre des performances fiables dans une large gamme d'applications.
Il est très petit, ultra-léger, consomme peu d’énergie et peut être mesuré sur une longue distance. Il convient aux appareils portables (imagerie thermique), aux applications de montage d'armes, aux systèmes portables et aux suites de capteurs légers ainsi qu'aux véhicules aériens sans pilote ou UGV.
Le B50MX est conçu pour les intégrateurs de systèmes à la recherche d'une solution de télémétrie laser pratique, puissante et compacte. Il offre des performances fiables dans une large gamme d'applications.
Il est très petit, ultra-léger, consomme peu d’énergie et peut être mesuré sur une longue distance. Il convient aux appareils portables (imagerie thermique), aux applications de montage d'armes, aux systèmes portables et aux suites de capteurs légers ainsi qu'aux véhicules aériens sans pilote ou UGV.
Protocole de communication
1. Protocole de transmission : communication série asynchrone ;
2. Tarif portuaire : 115 200 ;
3. Bits de données : 10 bits : un bit de démarrage, 8 bits de données, un bit d'arrêt, vérification invalide ;
4. Structure des données : les données comprennent l'octet d'en-tête, la partie commande, la longueur des données, la partie paramètre et l'octet de contrôle ;
5. Mode de communication : le contrôle principal envoie des commandes de contrôle à la machine télémétrique, et la machine télémétrique reçoit et exécute les instructions. Dans l'état de télémétrie, la machine de télémétrie renvoie les données et l'état de la machine de télémétrie à l'ordinateur supérieur selon le cycle de télémétrie. Le format de communication et le contenu des commandes sont indiqués dans le tableau suivant.
A) Le contrôle principal envoie
Le format du message à envoyer est le suivant :
2. Tarif portuaire : 115 200 ;
3. Bits de données : 10 bits : un bit de démarrage, 8 bits de données, un bit d'arrêt, vérification invalide ;
4. Structure des données : les données comprennent l'octet d'en-tête, la partie commande, la longueur des données, la partie paramètre et l'octet de contrôle ;
5. Mode de communication : le contrôle principal envoie des commandes de contrôle à la machine télémétrique, et la machine télémétrique reçoit et exécute les instructions. Dans l'état de télémétrie, la machine de télémétrie renvoie les données et l'état de la machine de télémétrie à l'ordinateur supérieur selon le cycle de télémétrie. Le format de communication et le contenu des commandes sont indiqués dans le tableau suivant.
A) Le contrôle principal envoie
Le format du message à envoyer est le suivant :
| STX0 | CMD | LEN | DONNÉES1H | DONNÉES1L | CHK |
Tableau 2 Description du format du message envoyé
| numéro de commande | nom | expliquer | code | remarques |
| 1 | STX0 | Indicateur de début de message | A5(H) |
|
| 2 | CMD | CW | Voir tableau 3 |
|
| 3 | LEN | DL | Le nombre de tous les octets à l'exception de la marque de début, du mot de commande et de la somme de contrôle |
|
| 4 | DONNÉES | paramètre | Voir tableau 3 |
|
| 5 | DONNÉES |
|
||
| 6 | CHK | Vérification XOR | À l'exception de l'octet valide, tous les autres octets sont XORés |
|
La commande est décrite comme suit :
Tableau 3 Description des commandes et mots de données envoyés par le maître à la machine télémétrique
Tableau 3 Description des commandes et mots de données envoyés par le maître à la machine télémétrique
| numéro de commande | CW | fonction | octet de données | remarques | longueur | Exemple de code |
| 1 | 0x00 | cesser | DONNÉES=00(H)DONNÉES=00(H) | Le télémètre arrête de mesurer | Six octets | A5 00 02 00 00 A7 |
| 2 | 0x01 | Gamme unique | DONNÉES=00(H)DONNÉES=00(H) |
|
Six octets | A5 01 02 00 00 A6 |
| 3 | 0x02 | Portée continue | DONNÉES=XX(H)DATAL=AA(H) | DATA décrit la période de télémétrie, en ms | Six octets | A5 02 02 03 E8 4E (plage 1 Hz) |
| 4 | 0x03 | auto-vérification | DONNÉES=00(H)DONNÉES=00(H) |
|
Six octets | A5 03 02 00 00 A4 |
| 5 | 0x04 | Définir la distance la plus proche de la sélection | DONNÉES=XX(H)DATAL=AA(H) | DATA décrit la valeur de la zone aveugle, unité 1m | Six octets | A5 04 02 00 64 C7 (100 m est la distance la plus proche) |
| 6 | 0x06 | Nombre cumulé de requêtes de puissance lumineuse | DONNÉES=00(H)DONNÉES=00(H) | Nombre cumulé de requêtes de puissance lumineuse | Six octets | A5 06 02 00 00 A1 |
| 7 | 0x11 | L'alimentation APD est activée | DONNÉES=00(H)DONNÉES=00(H) |
|
Six octets | A5 11 02 00 00B6 |
| 8 | 0x12 | L'alimentation de l'APD est coupée | DONNÉES=00(H)DONNÉES=00(H) |
|
Six octets | A5 12 02 00 00B5 |
| 9 | 0xEB | Requête de numéro | DONNÉES=00(H)DONNÉES=00(H) | Requête de numéro | Six octets | A5EB 02 00 00 4C |
a) Le contrôle principal reçoit le format
Le format du message reçu est le suivant :
Le format du message reçu est le suivant :
| STX0 | CMD | LEN | DONNÉES | DONNÉES0 | CHK |
Tableau 4 Description du format des messages reçus
| numéro de commande | nom | expliquer | code | remarques |
| 1 | STX0 | Indicateur de début de message 1 | A5 (H) |
|
| 2 | CMD_JG | Mot de commande de données | Voir tableau 5 |
|
| 3 | LEN | DL | Le nombre de tous les octets à l'exception de la marque de début, du mot de commande et de la somme de contrôle |
|
| 4 | Dn | paramètre | Voir tableau 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | Vérification XOR | À l'exception de l'octet valide, tous les autres octets sont XORés |
|
Description de l'état de réception du contrôle principal :
Le tableau 5 décrit le mot de données envoyé par le télémètre au contrôleur principal
Le tableau 5 décrit le mot de données envoyé par le télémètre au contrôleur principal
| numéro de commande | CW | fonction | octet de données | remarques | longueur totale |
| 1 | 0x00 | cesser | D1=00(H)D0=00(H) |
|
Six octets |
| 2 | 0x03 | auto-vérification | D8 ~ D1 | D8-D7 : tension -5 V, unité 0,01 V. D6-D5 : valeur d'angle mort, unité 1 mD4 : valeur haute tension APD, unité V ; D3 : type de caractère, indiquant la température APD, unité : degrés Celsius ; D2-D1 : tension +5 V, unité 0,01 V. | 12 octets |
| 3 | 0x04 | Distance jusqu'au paramètre d'accès le plus proche, unité m | D1 D0 | DATA décrit la valeur de distance la plus proche, unité 1 m ; début haut et fin bas | Six octets |
| 4 | 0x06 | Nombre cumulé de requêtes de puissance lumineuse | D3 ~ D0 | DATA exprime le nombre de lumières, 4 octets, avec l'octet de poids fort en premier | Sept octets |
| 5 | 0x11 | L'alimentation APD est activée | D1=00(H)D0=00(H) | L'alimentation APD est activée | Six octets |
| 6 | 0x12 | Mise hors tension de l'APD | D1=00(H)D0=00(H) | L'alimentation de l'APD est coupée | Six octets |
| 7 | 0xED | Faire des heures supplémentaires | 0x00 0x00 | Le laser est sous protection laser et ne peut pas être mesuré. | Six octets |
| 8 | 0xEE | Erreurs d'efficacité | 0x00 0x00 |
|
Six octets |
| 9 | 0XEF | Expiration du délai de communication du port série | 0x00 0x00 |
|
Six octets |
| 10 | 0x01 | Mesure à plage unique (cible unique, zéro pour les deuxième et troisième cibles, zéro pour la troisième cible au début et à la fin de la cible) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 première distance cible (unité 0,1 m)D5-D3 distance jusqu'à la deuxième cible (unité : 0,1 m)D2-D0 troisième distance cible (unité 0,1 m)3. Les objectifs vont de près à loin. Octet de drapeau D9 (bit7-bit0) : D9 est la 7ème position indiquant la vague principale ; 1 : il y a une onde principale, 0 : pas d'onde principale. D9 est la 6ème position indiquant l'écho ; 1 : il y a un écho, 0 : pas d'échoD9 La cinquième position indique l'état du laser ; 1 : laser normal, 0 : défaut laserD9 est le quatrième bit de l'indicateur de délai d'attente, 1 : normal, 0 : délai d'attenteD9 n'est pas valide à la 3ème position (définie sur 1) ;D9 La deuxième position indique l'état APD ; 1 : normal, 0 : erreurD9 est la première position pour indiquer s'il existe une cible précédente ; 1 : il y a une cible précédente, 0 : pas de cible précédente (cible dans la zone aveugle). D9 Le 0ème bit indique s'il y a une cible suivante ; 1 : il y a une cible suivante, 0 : aucune cible suivante (la cible après la cible principale est la cible suivante) | 14 octets |
| 11 | 0x02 | Portée continue (cible unique, zéro pour les deuxième et troisième cibles, zéro pour la troisième cible au début et à la fin de la cible) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 première distance cible (unité 0,1 m)D5-D3 distance jusqu'à la deuxième cible (unité : 0,1 m)D2-D0 troisième distance cible (unité 0,1 m)3. Les objectifs vont de près à loinOctet de drapeau D9 (bit7-bit0) :D9 est le 7ème bit pour indiquer la vague principale ; 1 : il y a une onde principale, 0 : pas d'onde principale. D9 est la 6ème position indiquant l'écho ; 1 : il y a un écho, 0 : pas d'échoD9 La cinquième position indique l'état du laser ; 1 : laser normal, 0 : défaut laserD9 est le quatrième bit de l'indicateur de délai d'attente, 1 : normal, 0 : délai d'attenteD9 n'est pas valide à la 3ème position (définie sur 1) ;D9 La deuxième position indique l'état APD ; 1 : normal, 0 : erreurD9 est la première position pour indiquer s'il existe une cible précédente ; 1 : il y a une cible précédente, 0 : pas de cible précédente (cible dans la zone aveugle).D9 Le 0ème bit indique s'il y a une cible suivante ; 1 : il y a une cible suivante, 0 : aucune cible suivante (la cible après la cible principale est la cible suivante) | 14 octets |
| 12 | 0xEB | Requête de numéro | J17……J0 | D17 D16 D15 D14 D13 D12 Code de modèle de machine entièreD11D10 Numéro de produitD9 Version du logiciel D6D5 D4 Numéro APDD3 D2 Numéro laserVersion D1 du FPGA | 22 octets |
| Remarque : ① Octet/bit de données non défini, la valeur par défaut est 0 ; | |||||
Balises actives: Module télémètre laser (LRF) sans danger pour les yeux de 5 km, fabricants, fournisseurs, usine, Chine, fabriqué en Chine, personnalisé, de haute qualité
Catégorie associée
Module télémètre laser 905nm
Module télémètre laser 1535nm
Module télémètre laser 1570nm
Module de télémètre 1.54UM
1064nm Cibler de cible laser
Module anti-drone
Module Lidar de télémétrie
envoyer une demande
N'hésitez pas à faire votre demande dans le formulaire ci-dessous. Nous vous répondrons dans les 24 heures.